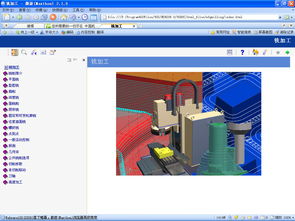
在CAD软件技术学习交流区,我们一直致力于分享高质量的技术资源,以促进同行间的学习与进步。今天,我很高兴为大家带来一份精品资源——一套超精细的施耐德Portal Robot三维装配模型。
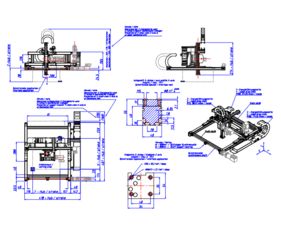
这套模型以施耐德电气的Portal Robot为原型,经过精心建模与装配,细节表现极为出色,能够清晰展示机器人的结构布局、运动机构及关键零部件。它不仅适用于视觉参考,更能为机械设计、自动化方案模拟、培训教学等实际应用提供有力支持。模型支持SolidWorks 2006格式,确保了良好的兼容性,方便使用该版本或兼容版本软件的用户直接打开、研究和修改。
模型亮点:
1. 高精度与完整性: 模型严格遵循设备实际结构,包含完整的装配体关系,各部件定位准确,可进行基本的运动模拟分析。
2. 格式通用性: 提供SolidWorks 2006原生格式文件,该格式在后续许多版本中都能良好兼容,便于广大工程师和学子使用。
3. 学习价值高: 对于学习工业机器人结构、大型设备装配体设计方法以及施耐德自动化产品设计的同行而言,这是一份不可多得的参考资料。
分享与转让说明:
此模型资源可通过技术转让的方式进行分享。我们鼓励在尊重知识产权和原始模型来源的前提下,进行纯粹的技术学习、研究与内部交流。希望这份资源能够帮助大家在CAD技术应用和自动化设备理解上更上一层楼。
欢迎各位同仁下载研究,并在交流区就模型细节、设计思路或应用场景展开讨论,共同营造积极、专业的技术分享氛围。